Машиной принято называть механическое устройство, выполняющее определенную полезную работу, связанную с процессом производства или преобразованием энергии. Во всякой машине имеется исполнительный (рабочий) орган, который приводится в действие машиной-двигателем через систему механизмов.
Механизмом называют определенную совокупность подвижных и неподвижных частей, которые обеспечивают передачу и преобразование движений и сил для выполнения машиной полезной работы.
Тела, входящие в механизм, называются звеньями. Звено может состоять из одной или нескольких неподвижно соединенных между собой деталей. В любом механизме, кроме подвижных звеньев, обязательно имеется неподвижное звено. Звено, движение которому сообщается за счет приложения внешних сил или моментов сил, называют ведущим, а звено, которому движение передается, называют ведомым. Так, в машинных тисках рукоятка — ведущее звено, подвижная губка — ведомое звено, а неподвижная губка вместе с корпусом образует неподвижное звено. Иногда механизмы имеют самостоятельное применение — преобразователи движения (механизмы часов, арифмометров, тахометров и т. п. приборов), но чаще всего механизм является кинематической основой машины.
Таким образом, машину и механизм отличает от сооружения основной признак: при выполнении своего назначения элементы сооружения находятся в статическом состоянии, в то время как в механизме и машине отдельные части обязательно находятся в движении.
В то же время механизм от машины отличается тем, что механизм не предназначен ни для преодоления полезных сопротивлений (то есть для совершения полезной работы), ни тем более, для преобразования энергии,, в то время как машина именно эти функции и выполняет.
]]>В кинематических парах звенья могут получать относительное, вращательное, поступательное или сложное движение. Соответственно и различают вращательные, поступательные и пары сложного движения. Например, зубчатые колеса образуют вращательную пару, ползун и направляющие устройства — поступательную пару, винт и гайка — пару сложного движения или винтовую пару.
Соединения кинематических пар, в свою очередь, образуют кинематическую цепь. Для изображения механизмов и их составных частей — звеньев и кинематических пар — пользуются стандартными условными обозначениями. Неподвижность звеньев в парах всех видов отмечается на схемах подштриховкой.
В качестве примера приведем последовательное изображение кинематической схемы двигателя внутреннего сгорания, конструкция которого показана на рис. 25.
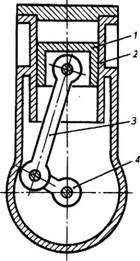
Рис. 25
Ведущим звеном, конечно, является поршень 1, так как движение ему сообщают внешние силы (давление газа или пара). Поршень совершает возвратно-поступательное движение относительно стенок неподвижного цилиндра 2. Ведомое звено — вал с кривошипом 4 — совершает вращательное движение. Между ведущим и ведомым звеньями находится промежуточное — шатун 3, совершающий плоскопараллельное движение.
Поршень — это ползун, стенки цилиндра — направляющие, следовательно, эта кинематическая пара согласно стандартным условным изображениям изобразится как показано на рис. 26,I. Вал с кривошипом, совершающий вращательное движение относительно неподвижной опоры, изобразится как показано на рис. 26, II. Шатун — это стержень, концы которого связаны: один с ползуном, другой с кривошипом (рис, 26, III). Связав все звенья воедино, получим схематическое изображение механизма двигателя (рис. 26, IV).
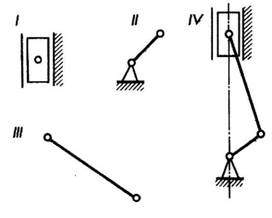
Рис. 26
В этом механизме — четыре звена: ползун, шатун, кривошип и одно неподвижное звено, обозначенное в двух местах подштриховкой. Однако следует обратить внимание на то, что с кинематической точки зрения — это одно звено, хотя реальных деталей может быть несколько (цилиндр, корпус и т. д.). Кинематических пар также четыре — три вращательных и одна поступательная.
По структурно-конструктивным признакам различают механизмы плоские, у которых точки звеньев описывают траектории, лежащие в параллельных плоскостях, и пространственные, которые осуществляют взаимодействие между звеньями, расположенными в различных плоскостях.
На рис. 27 приведена схема пространственного механизма, у которого звенья (стержни) сочленены двумя парами шарниров: шарнирами с одной осью 1 и сферическими шарнирами 3. Как видно из схемы, ведущее 2 и ведомое 4 звенья могут совершать вокруг шарниров 1 только вращательное движение, каждое в своей плоскости. Промежуточное звено, заключенное между двумя сферическими шарнирами 3, будет совершать сложные колебательные движения.
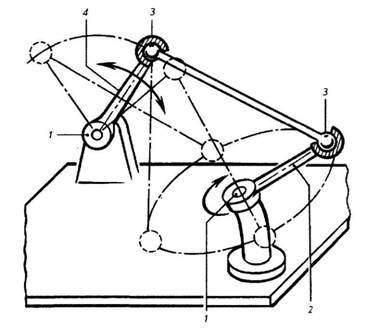
Рис. 27
Плоский механизм (рис. 28) отличается от пространственного тем, что все его звенья, в том числе и опоры, и исполнительного звена (поступательной пары 4), лежат в одной плоскости. Изображенный на схеме механизм содержит шесть вращательных пар 2— шарниров, каждое из которых представляет сочленение двух звеньев 1 и 3 с одной осью, допускающей вращательное их движение только в одной плоскости.
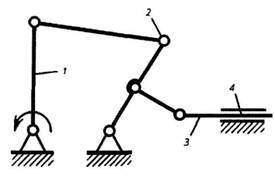
Рис. 28
Звенья механизмов, в зависимости от их конструктивной особенности, могут быть неподвижны, совершать вращательные, поступательные и другие движения. Но в каждом механизме, преобразующем движение, имеются, как уже можно было увидеть из вышеприведенных примеров, шарниры с заданными наперед кинематическими свойствами.
На рис. 29 изображены конструктивные разновидности шарнирных сочленений. Поз. I и II — шарнирные сочленения с одной осью двух и трех звеньев, которые могут совершать только круговые движения в одной плоскости. Поз. III и IV — шарнирные сочленения, которые допускают вращательные движения своих звеньев во взаимно-перпендикулярных плоскостях.
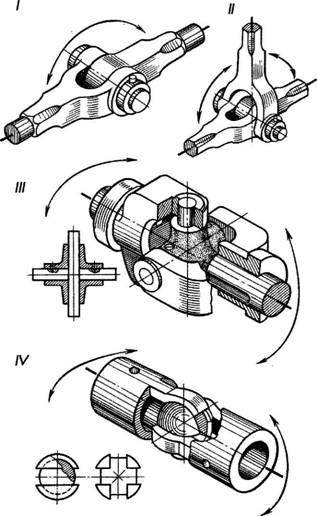
Рис. 29
При разработке новых механизмов конструктор прочерчивает несколько вариантов кинематических схем и из них выбирает оптимальный. На основании отобранной схемы производится техническая и технологическая разработка деталей и их конструктивное формообразование. Именно кинематическая схема, разработанная на стадии эскизного проектирования, является отправной конструкцией будущего механизма.
]]>Зубчато-реечный механизм (рис. 30)
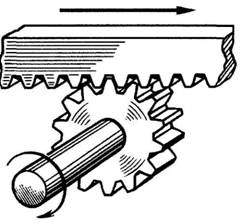
Рис. 30
Винтовой механизм (рис. 31)
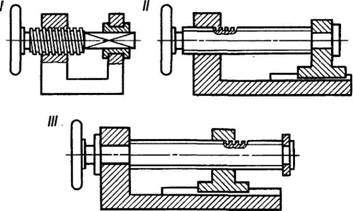
Рис. 31
Кривошипный механизм (рис. 32)

Рис. 32
Кулисный механизм (рис. 37)
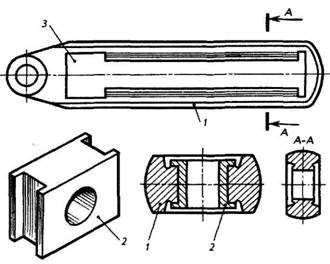
Рис. 37
Кулачковый механизм (рис. 39 и 40)
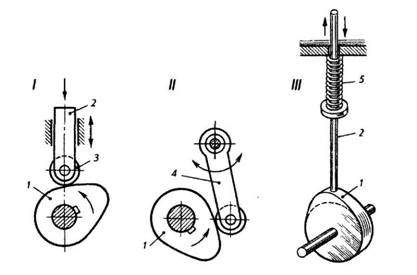
Рис. 39
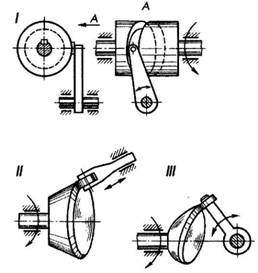
Рис. 40
]]>- вращая зубчатое колесо на неподвижной оси, перемещать поступательно рейку (например, в реечном домкрате, в механизме подачи сверлильного станка);
- обкатывая колесо по неподвижной рейке, перемещать ось колеса относительно рейки (например, при осуществлении продольной подачи суппорта в токарном станке).
Рис. 30
]]>гайка неподвижна, винт вращается и одновременно поступательно перемещается с салазками. Салазки шарнирно соединены с винтом и могут совершать возвратно-поступательное движение в зависимости от направления движения винта по направляющим (рис. 31, II);
винт закреплен так, что может лишь вращаться, а гайка (в данном случае салазки) лишена возможности вращаться, так как ее нижняя (или другая) часть установлена между направляющими. В этом случае гайка (салазки) будет перемещаться поступательно (рис. 31, III).
Рис. 31
В перечисленных винтовых механизмах применяются резьбы различного профиля, чаще всего прямоугольная и трапецевидная (к примеру в слесарных тисках, домкратах и т. п.). Если угол подъема винтовой линии небольшой, то ведущим движением является вращательное. При очень большом угле подъема винтовой линии возможно преобразование поступательного движения во вращательное и тому примером может служить быстродействующая отвертка.
]]>
Рис. 32
Кривошипный механизм — механизм, преобразующий один вид движения в другой. Например, равномерно вращательное — в поступательное, качательное, неравномерное вращательное и т. д. Вращающееся звено кривошипного механизма, выполненное в виде кривошипа или коленчатого вала, связано со стойкой и другим звеном вращательными кинематическими парами (шарнирами). Принято различать подобные механизмы на кривошипно-шатунные, кривошипно-коромысловые, кривошипно- кулисные и др. в зависимости от характера движения и наименования того звена, в паре с которым работает кривошип.
Используются кривошипные механизмы в поршневых двигателях, насосах, компрессорах, прессах, в приводе движения металлорежущих станках и других машинах.
Кривошипно-шатунный механизм — один из самых распространенных механизмов преобразования движения. Его применяют как для преобразования вращательного движения в возвратно-поступательное (например, поршневые насосы), так и для преобразования возвратно-поступательного во вращательное (например, двигатели внутреннего сгорания).
Шатун — деталь кривошипно-шатунного (ползунного) механизма, передающая движение поршня или ползуна на кривошип коленчатого вала. Часть шатуна, служащая для присоединения к коленчатому валу, называется кривошипной головкой, а противоположная часть — поршневой (или ползунной)головкой.
Механизм состоит из стойки 1 (рис. 33), кривошипа 2, шатуна 3 и ползуна 4. Кривошип совершает непрерывное вращение, ползун — возвратно-поступательное движение, а шатун — сложное, плоско-параллельное движение. , Полный ход ползуна получается равным удвоенной длине кривошипа. Рассматривая перемещения ползуна из одного положения в другое, нетрудно увидеть, что при повороте кривошипа на равные углы ползун проходит разное расстояние: при движении от крайнего положения к среднему участки пути ползуна увеличиваются, а при движении от среднего положения к крайнему — уменьшаются. Это свидетельствует о том, что при равномерном движении кривошипа ползун движется неравномерно. Так скорость движения ползуна меняется от нуля в начале его движения и достигает наибольшей величины, когда кривошип и шатун образуют между собой прямой угол, затем снова уменьшается до нуля при другом крайнем положении.
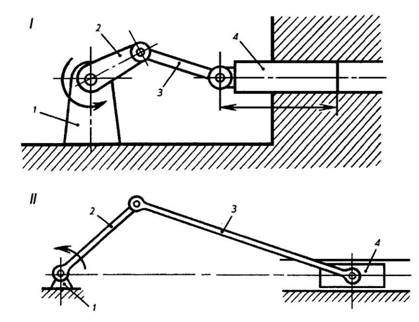
Рис. 33
Неравномерность хода ползуна вызывает появление сил инерции, оказывающих отрицательное влияние на весь механизм. В этом главный недостаток кривошипно-ползунного механизма.
В некоторых кривошипно-шатунных механизмах возникает необходимость в обеспечении прямолинейности движения поршневого штока 4 (рис. 34). Для этого между кривошипом 1, шатуном 2 и ползуном 5 используют так называемый крейцкопф 3, воспринимающий на себя качательные движения шатуна (4 — шток промежуточный).
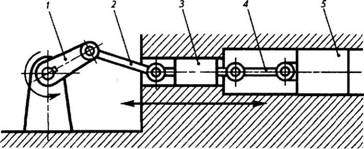
Рис. 34
]]>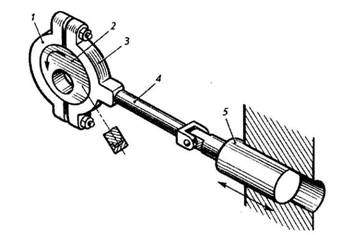
Рис. 35
По этой причине эксцентриковый механизм применяют только в тех машинах, где необходимо вращательное движение преобразовывать в возвратно-поступательное движение и создавать небольшой ход исполнительному органу при значительных силах. К таким машинам относятся штампы, прессы и др.
Кривошипно-коромысловый механизм. Коромысло — звено рычажного механизма и представляет собой деталь в виде двуплечевого рычага, качающегося около средней неподвижной оси на стойке. На рис. 36 представлены конструктивная (I) и кинематическая (II) схемы такого механизма. Кривошип 1 может совершать вращательное движение. Кинематическая цепочка: кривошип 1, шатун 2 и коромысло 3, связанная шарнирными сочленениями, заставляет коромысло совершать качательные движения вокруг неподвижной оси на стойке.
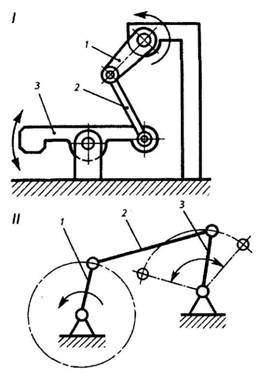
Рис. 36
Применяют кривошипно-коромысловый механизм в рессорных подвесках паровозов, вагонов, в конструкциях машин для испытания материалов, весов, буровых станков и др.
]]>
Рис. 37
Кривошипно-кулисный механизм. На рис. 38 показаны наиболее распространенные конструктивные разновидности таких механизмов.
На рис. 38, I показано, что вокруг неподвижной оси вращается кривошип 3, шарнирно соединенный одним концом с ползуном (кулисным камнем) 2. При этом ползун начинает скользить (перемещаться) в продольном прямолинейном пазу, прорезанном в рычаге (кулисе) 1, и поворачивать его вокруг неподвижной оси. Длина кривошипа позволяет придать кулисе вращательное движение. Подобные механизмы служат для преобразования равномерного вращательного движения кривошипа в неравномерное вращательное движение кулисы, но если при этом длина кривошипа равна расстоянию между осями опор кривошипа и кулисы, то получается кривошипно-шатунный механизм с равномерно вращающейся кулисой.
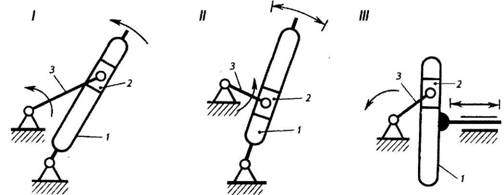
Рис. 38
Кривошипно-кулисный механизм с качающейся кулисой (рис. 38, II) служит для преобразования вращательного движения кривошипа 3 в качательное движение кулисы 1 и при этом происходит быстрый ход при движении ползуна в одну сторону и медленный — в другую. Механизм широко применяется в металлорежущих станках, например: в поперечно-строгальных, зубодолбежных и др.
Кривошипно-кулисный механизм с поступательно движущейся кулисой (рис. 38, III) служит для преобразования вращательного движения кривошипа 3 в прямолинейно-поступательное движение кулисы 1. В механизме кулиса может быть расположена вертикально или наклонно. Применяется такой механизм для малых длин хода и находит широкое применение в счетных машинах (синусный механизм).
]]>Кулачковые механизмы — преобразующие механизмы, изменяющие характер движения. В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратно-поступательное и возвратно-качательное. Кулачковые механизмы (рис. 39 и 40), как и другие виды механизмов, подразделяют на плоские и пространственные.
Рис. 39
Рис. 40
Кулачковые механизмы применяют для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т. д. Основным элементом системы газораспределения двигателя внутреннего сгорания является простейший кулачковый механизм, изображенный на рис. 39, I. Механизм состоит из кулачка 1, штанги 2, связанной с рабочим органом, и стойки, поддерживающей в пространстве звенья механизма и обеспечивающей каждому звену соответствующие степени свободы. Ролик 3, устанавливаемый в некоторых случаях на конце штанги, не влияет на закон движения звеньев механизма. Штанга, совершающая поступательное движение, называется толкателем 2, а вращательное — коромыслом 4 (рис. 39, II). При непрерывном движении кулачка толкатель совершает прерывное поступательное, а коромысло — прерывное вращательное движения.
Обязательным условием нормальной работы кулачкового механизма является постоянное касание штанги и кулачка (замыкание механизма). Замыкание механизма может быть силовым и геометрическим. В первом случае замыкание обычно обеспечивается пружиной 5 (рис. 39, III), прижимающей штангу к кулачку, во втором — конструктивным оформлением толкателя, особенно, его рабочей поверхности. К примеру, толкатель с плоской поверхностью (рис. 39, III) касается кулачка разными точками, потому его применяют только в случае передачи малых усилий.
В машинах легкой промышленности для обеспечения весьма сложного взаимосвязанного движения деталей,
наряду с простейшими плоскими, применяют пространственные кулачковые механизмы. В пространственном кулачковом механизме можно увидеть типичный пример геометрического замыкания — цилиндрический кулачок с профилем в виде паза, в который входит ролик толкателя (рис. 40,I).
При выборе типа кулачкового механизма стараются остановиться на применении плоских механизмов, имеющих значительно меньшую стоимость по сравнению с пространственными, и во всех случаях, когда это возможно, используют штангу качающейся конструкции, так как штангу (коромысло) удобно устанавливать на опоре с применением подшипников качения. Кроме того, в этом случае габаритные размеры кулачка и всего механизма в целом могут быть меньше.
Изготовление кулачковых механизмов с коническими и сферическими кулачками (рис. 40, II и III) является сложным техническим и технологическим процессом, а потому и дорогим. Поэтому такие кулачки применяют в сложных и точных приборах.
]]>