Кинематические схемы механизмов |
|
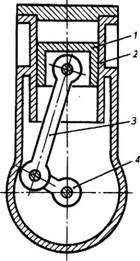
Чтобы разобраться в устройстве механизма, следует обратить внимание не на отдельно взятые звенья, а на характер их соединения. Подвижное соединение двух звеньев в механизмах называется кинематической парой. При этом следует интересоваться лишь кинематическими возможностями пар (то есть возможностью звеньев совершать определенные движения) и не принимать во внимание конструктивные особенности. В кинематических парах звенья могут получать относительное, вращательное, поступательное или сложное движение. Соответственно и различают вращательные, поступательные и пары сложного движения. Например, зубчатые колеса образуют вращательную пару, ползун и направляющие устройства — поступательную пару, винт и гайка — пару сложного движения или винтовую пару. Соединения кинематических пар, в свою очередь, образуют кинематическую цепь. Для изображения механизмов и их составных частей — звеньев и кинематических пар — пользуются стандартными условными обозначениями. Неподвижность звеньев в парах всех видов отмечается на схемах подштриховкой. В качестве примера приведем последовательное изображение кинематической схемы двигателя внутреннего сгорания, конструкция которого показана на рис. 25.
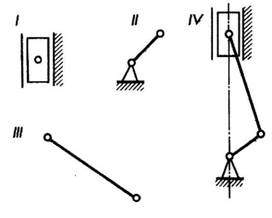
Рис. 25 Ведущим звеном, конечно, является поршень 1, так как движение ему сообщают внешние силы (давление газа или пара). Поршень совершает возвратно-поступательное движение относительно стенок неподвижного цилиндра 2. Ведомое звено — вал с кривошипом 4 — совершает вращательное движение. Между ведущим и ведомым звеньями находится промежуточное — шатун 3, совершающий плоскопараллельное движение. Поршень — это ползун, стенки цилиндра — направляющие, следовательно, эта кинематическая пара согласно стандартным условным изображениям изобразится как показано на рис. 26,I. Вал с кривошипом, совершающий вращательное движение относительно неподвижной опоры, изобразится как показано на рис. 26, II. Шатун — это стержень, концы которого связаны: один с ползуном, другой с кривошипом (рис, 26, III). Связав все звенья воедино, получим схематическое изображение механизма двигателя (рис. 26, IV).
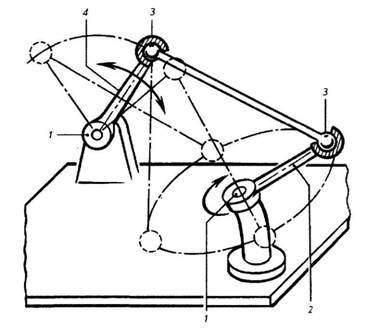
Рис. 26 В этом механизме — четыре звена: ползун, шатун, кривошип и одно неподвижное звено, обозначенное в двух местах подштриховкой. Однако следует обратить внимание на то, что с кинематической точки зрения — это одно звено, хотя реальных деталей может быть несколько (цилиндр, корпус и т. д.). Кинематических пар также четыре — три вращательных и одна поступательная. По структурно-конструктивным признакам различают механизмы плоские, у которых точки звеньев описывают траектории, лежащие в параллельных плоскостях, и пространственные, которые осуществляют взаимодействие между звеньями, расположенными в различных плоскостях. На рис. 27 приведена схема пространственного механизма, у которого звенья (стержни) сочленены двумя парами шарниров: шарнирами с одной осью 1 и сферическими шарнирами 3. Как видно из схемы, ведущее 2 и ведомое 4 звенья могут совершать вокруг шарниров 1 только вращательное движение, каждое в своей плоскости. Промежуточное звено, заключенное между двумя сферическими шарнирами 3, будет совершать сложные колебательные движения.
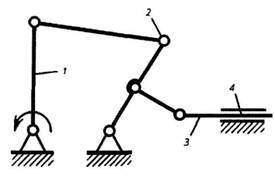
Рис. 27 Плоский механизм (рис. 28) отличается от пространственного тем, что все его звенья, в том числе и опоры, и исполнительного звена (поступательной пары 4), лежат в одной плоскости. Изображенный на схеме механизм содержит шесть вращательных пар 2— шарниров, каждое из которых представляет сочленение двух звеньев 1 и 3 с одной осью, допускающей вращательное их движение только в одной плоскости.
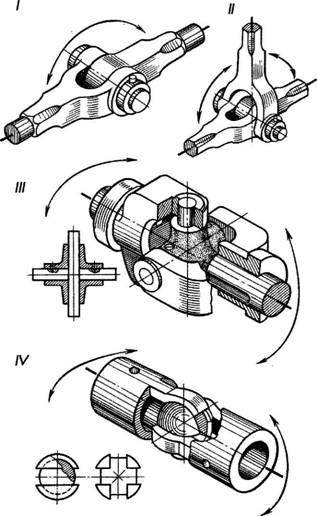
Рис. 28 Звенья механизмов, в зависимости от их конструктивной особенности, могут быть неподвижны, совершать вращательные, поступательные и другие движения. Но в каждом механизме, преобразующем движение, имеются, как уже можно было увидеть из вышеприведенных примеров, шарниры с заданными наперед кинематическими свойствами. На рис. 29 изображены конструктивные разновидности шарнирных сочленений. Поз. I и II — шарнирные сочленения с одной осью двух и трех звеньев, которые могут совершать только круговые движения в одной плоскости. Поз. III и IV — шарнирные сочленения, которые допускают вращательные движения своих звеньев во взаимно-перпендикулярных плоскостях.
Рис. 29 При разработке новых механизмов конструктор прочерчивает несколько вариантов кинематических схем и из них выбирает оптимальный. На основании отобранной схемы производится техническая и технологическая разработка деталей и их конструктивное формообразование. Именно кинематическая схема, разработанная на стадии эскизного проектирования, является отправной конструкцией будущего механизма. |